KSYで単品が売ってたので、こうにう。
2,915円+送料550円=3,465円。
カメラのソケットが壊れてるので、ソケットを直そうとすると、2,000円位掛かるので、それなら新品の方が手っ取り早い。
SDカード運用なので、カードの差し替えでOKだから楽でいい 🙂

I know who Iam.
KSYで単品が売ってたので、こうにう。
2,915円+送料550円=3,465円。
カメラのソケットが壊れてるので、ソケットを直そうとすると、2,000円位掛かるので、それなら新品の方が手っ取り早い。
SDカード運用なので、カードの差し替えでOKだから楽でいい 🙂
Raspberry Pi Zero 2 Wで以前、bluetooth ヘッドフォンを接続していたが、10→11にアップデートしてからは、接続が安定しない。
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 |
noizumi@rx7pi:~ $ sudo systemctl status bluetooth.service ● bluetooth.service - Bluetooth service Loaded: loaded (/lib/systemd/system/bluetooth.service; enabled; vendor preset: enabled) Active: active (running) since Sun 2023-08-20 13:43:22 JST; 6min ago Docs: man:bluetoothd(8) Main PID: 1271 (bluetoothd) Status: "Running" Tasks: 1 (limit: 407) CPU: 647ms CGroup: /system.slice/bluetooth.service └─1271 /usr/libexec/bluetooth/bluetoothd 8月 20 13:43:22 rx7pi bluetoothd[1271]: profiles/sap/server.c:sap_server_register() Sap driver initialization failed. 8月 20 13:43:22 rx7pi bluetoothd[1271]: sap-server: Operation not permitted (1) 8月 20 13:43:22 rx7pi bluetoothd[1271]: Failed to set privacy: Rejected (0x0b) 8月 20 13:43:22 rx7pi bluetoothd[1271]: Endpoint registered: sender=:1.71 path=/MediaEndpoint/A2DPSink/sbc 8月 20 13:43:22 rx7pi bluetoothd[1271]: Endpoint registered: sender=:1.71 path=/MediaEndpoint/A2DPSource/sbc 8月 20 13:43:22 rx7pi bluetoothd[1271]: Set device flags return status: Invalid Parameters 8月 20 13:43:30 rx7pi bluetoothd[1271]: Endpoint registered: sender=:1.99 path=/MediaEndpoint/A2DPSink/sbc 8月 20 13:43:30 rx7pi bluetoothd[1271]: Endpoint registered: sender=:1.99 path=/MediaEndpoint/A2DPSource/sbc 8月 20 13:43:30 rx7pi bluetoothd[1271]: src/profile.c:ext_start_servers() RFCOMM server failed for Headset Voice gateway: rfcomm_bind: Address already in use (98) 8月 20 13:43:30 rx7pi bluetoothd[1271]: src/profile.c:ext_start_servers() RFCOMM server failed for Headset unit: rfcomm_bind: Address already in use (98) |
そういや、10の時に、sap server がどーたらで何か設定を変更した憶えがある。
次のページに解決法が書いてあったので実施。
情報源: Raspberry Pi 4のBluetoothから音を鳴らす呪い | hixの日記 | スラド
|
1 |
noizumi@rx7pi:~ $ sudo systemctl edit --full bluetooth.service |
|
1 2 |
#ExecStart=/usr/libexec/bluetooth/bluetoothd ExecStart=/usr/libexec/bluetooth/bluetoothd --noplugin=sap |
確か前にこういう設定をした憶えがあったけど、このブログに記録がねーんだよなあ。
|
1 2 |
noizumi@rx7pi:~ $ sudo systemctl daemon-reload noizumi@rx7pi:~ $ sudo systemctl restart bluetooth.service |
bluetoothd を再起動して、接続テストしたら、切断されず、接続が維持できた。
bluetooth ヘッドフォンの接続をトリガーに、rx7pi の動体検知や、GPSの位置チェックを止めるという処理をしていたが、これで万事OK 🙂
|
1 2 3 4 5 6 7 |
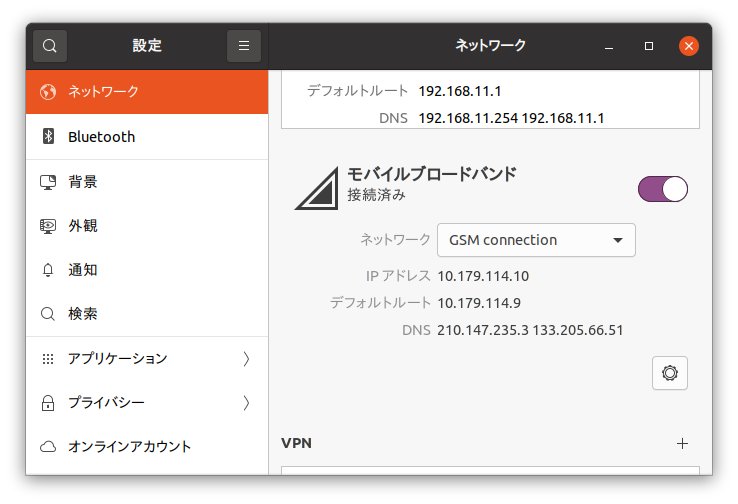
noizumi@rx7pi:~ $ nmcli con NAME UUID TYPE DEVICE aterm-f88921-g aac44e15-61ab-4a17-a712-0f813fc7eb2f wifi wlan0 iijmio 2fb23a81-e2a9-4a00-a318-1bea37a2be3d gsm cdc-wdm0 wg0 c556b10e-b638-42b6-a23c-0108f617b6dc wireguard wg0 donedone c59a1718-9cb4-406b-b043-9106eca59d3e gsm -- povo2.0 e11025e3-e746-44e3-9ebb-82868840c9fa gsm -- |
raspberry pi zero2 Wにて、NetworkManager のモバイルブロードバンド設定で iijmio 設定したら、無事、起動して即LTE回線接続するようにできた。
EM7430の通信カードで、povo2.0 のSIMだとダメだけど、iijmio の eSIMを eSIM.me の物理SIMカードに焼いた奴を挿したらいけた。
eSIMだから、月額440円で2GBまでの契約なんだが、もう一枚か……うーん。
eSIM.meのブランクカード余ってるから、もう一枚 eSIM契約でいけるし、今使ってる携帯電話の OPPO Reno7 Aは eSIM対応してるから、eSIM.me に焼かなくてもそれに使えばいいという話もある。
正直、通信速度が128kbpsでも事足りるから、iijmioのスペックは過剰で、povo2.0が使えていれば、丸く収まってたのに、色々と悩むなあ。
ノートPCのOneMix3 用にEM7430 M.2(技適あり)をaliexpress で調達していたのだが、結局、OneMix3 は本体にSIMスロットが付いて無いので、SIMスロットを別途調達して半田付けするとか凄く面倒だったので、放置していた。
OneMix3はキーボードがイカれていて、起動すると、押して無いキーの文字が連打されるという感じで、実質、ジャンクと化している。
EM7430は一回も使ってなくて、車載のRaspberry Pi Zero 2W に接続したら、今やってる携帯電話接続よりは電気喰わないんじゃ無かろうか? と思った。
※商品画像紹介にアフィリエイト使ってます。
で、Amazon で、「M.2-USB 3.0アダプター M2ネジ付きプッシュコネクター デュアルSIMカードスロットコンピューター用ドライバー3G / 4G / 5Gモジュール」なんてのが売っていて、デュアルSIMのスロット付きだったので、買ってPCへ接続してみた。
ちなみに、EM7430の通信カードと、それに接続するLTEアンテナを事前に調達しておいた。
最初、アンテナを繋がずに、「繋がらねえ!」とか言ってたのは秘密だ 😀
先に、Windows11 の仮想マシンに繋ぐと、あっさりとピクトのモバイル接続設定が出てきて、簡単に繋がった。
そして、Ubuntu 20.04 へ繋いでみると、
donedone のAPN設定のページに書かれている APN: biglobe.jp と設定したら、あっさり繋がった。
|
1 2 3 4 5 6 7 8 9 |
noizumi@greyhound:~$ netstat -nr カーネルIP経路テーブル 受信先サイト ゲートウェイ ネットマスク フラグ MSS Window irtt インタフェース 0.0.0.0 192.168.11.1 0.0.0.0 UG 0 0 0 eth0 0.0.0.0 10.179.114.9 0.0.0.0 UG 0 0 0 wwan0 10.179.114.8 0.0.0.0 255.255.255.252 U 0 0 0 wwan0 169.254.0.0 0.0.0.0 255.255.0.0 U 0 0 0 eth0 192.168.11.0 0.0.0.0 255.255.255.0 U 0 0 0 eth0 192.168.123.0 0.0.0.0 255.255.255.0 U 0 0 0 virbr0 |
wwan0 つーデバイスになるのね。
ちょっと失敗したなと思ったのが、この手の製品って Windows のドライバでハードウェアの初期化する事を前提にしている場合があって、Windowsを持ってない人は Linux でいくらやっても使えないという可能性があるという事。
まあ、人柱になれんですまんけど、とりあえず、わしの環境だと、Windows があるので、EM7430のカードは Linux で使えるので、問題なし。 🙂
しかし、 GUIで設定できるらしいというのは分かっていたが、Raspberry Pi Zero 2Wは、CUI環境なので、どうやって設定すんのかよく分からんというのが問題だな。
|
1 2 |
Car Security alarm was GPS Warning! 18599.26m moved. at 2023/01/20 19:50:58 https://maps.google.com/maps?q=35.052185000,136.240325000 |
車載Raspberry Pi Zero 2Wからひっきりなしにメールが届いたが、「車が 18.6km移動してるよ」との事。
もちろん、移動してないので、GPSの測位誤差なんだろうけど、凄いズレ方。
平和堂の屋内立体駐車場に停めると、こういう事が起ったのはこれで2回めで、何か、GPSを狂わせる毒電波でも出てるのだろうか……
前の投稿でGALILEOが補足されないと書いていたが、Windows 10環境で、u-centerで見た時に、GALILEOがenableになってなかったってのがある。
確認の為に、再び u-center で見てみると……
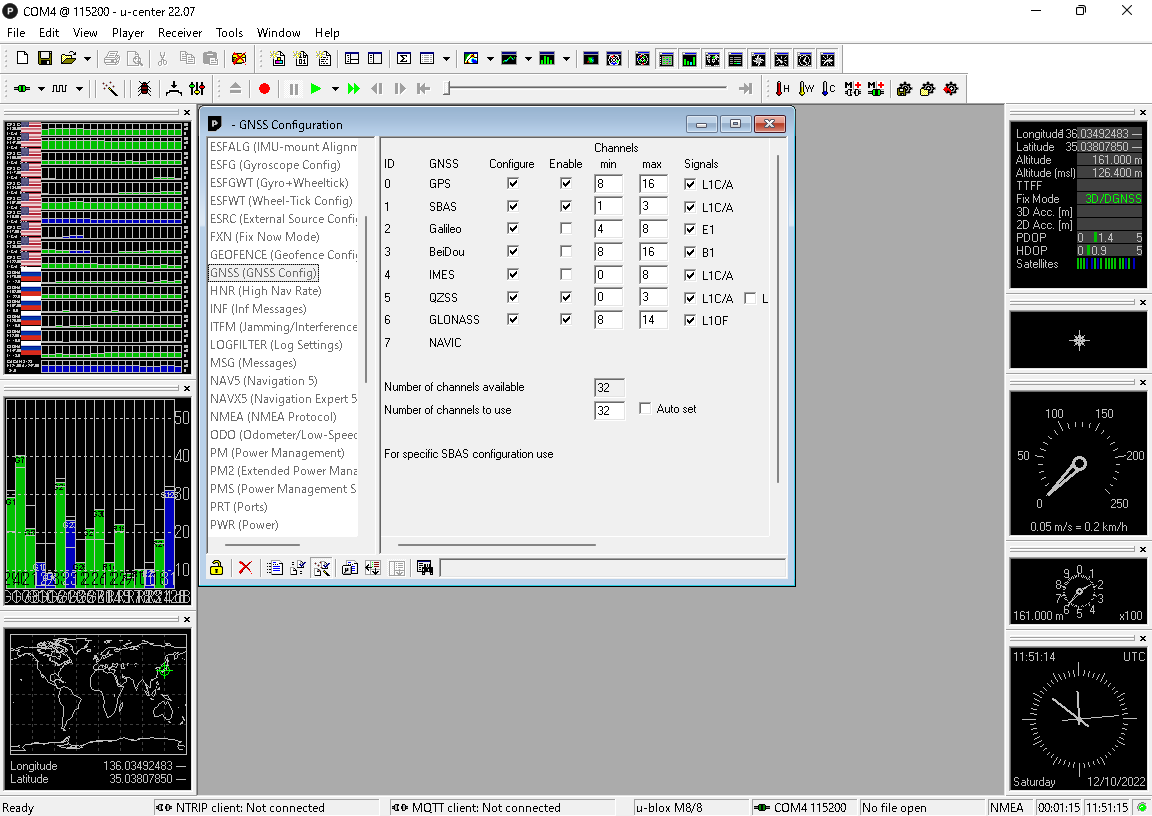
やっぱりGALILEOが有効じゃない。
このモジュールは、GLONASS か Beidou の排他選択が可能なので、GALILEO、Beidouを有効にして、GLONASS を無効にした。
あと、QZSS の L1S 信号にチェックが入ってなかったので、入れた。
これで、精度上がるのかな?
Receiver > Action > Save config で保存して、車載のRaspberri Pi Zero 2 Wに接続してみた。
GPがGPS、QZがQZSS,GAがGALILEO、BDがBeidouね。
衛星捕捉数が増えて、28個の衛星を使ってるな。よしよし。
しかし、初期状態で、GALILEO無効の場合もあるのか。油断ならないな。
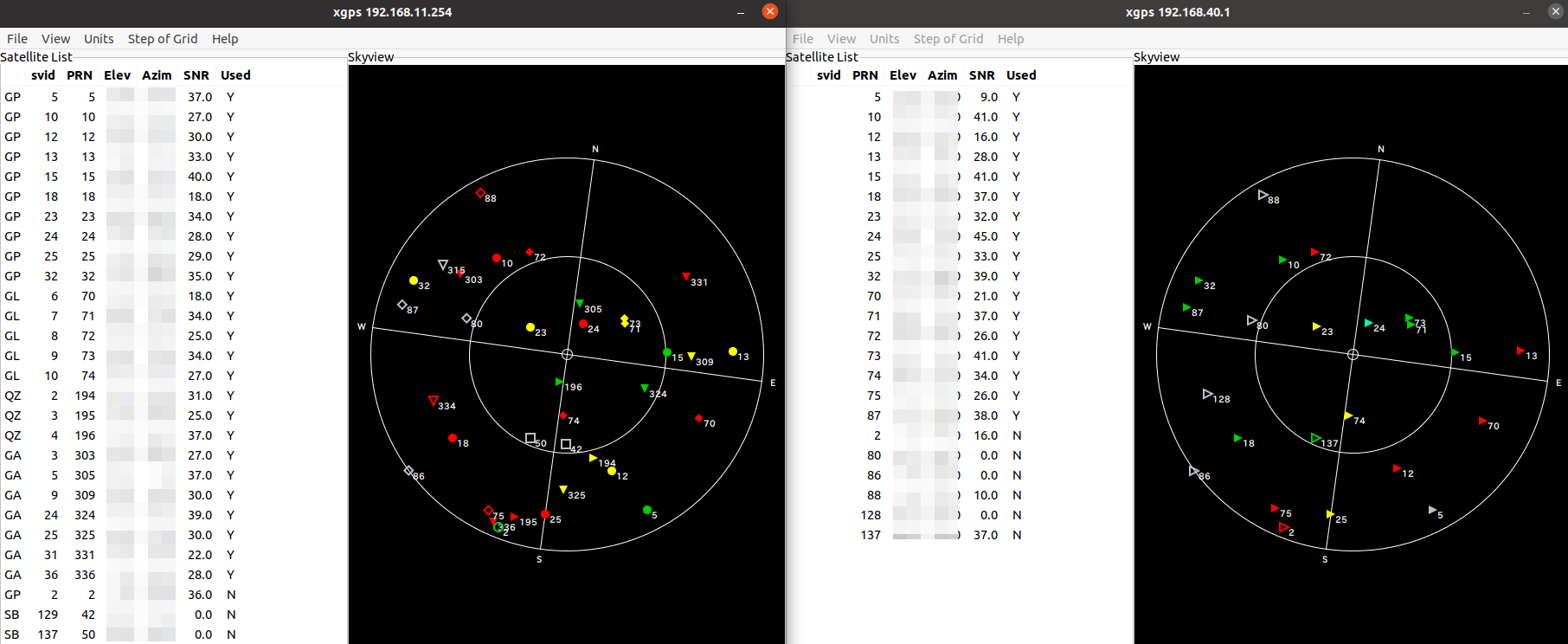
GPS補足状況を確認しようと思ったので、取り敢えず、2ウインドウ表示して比較。
右がRaspberry Pi Zero 2 W(以下rx7pi)のGPSで、左が、ホームサーバーのRaspberry Pi 4のGPS。
GPSは、TOPGNSS GN803Gという製品で、2つ共同じなのだが、車載のrx7pi の方は、PRN194〜196のQZSSと、PRN300番台のGALILEOが表示されてない。
Ubuntu 20.04の gpsd-3.21 だと、QZSSが表示されているのは確認できているので、rasbian の gpsd-3.17だと対応していない疑惑。
Raspberry Pi 4の方は野良ビルドで、gpsd-3.24 を入れてあるので、rx7pi の方にも入れてやろう。
「Building GPSD from source」を参考にして、
|
1 2 |
noizumi@rx7pi:~/src $ wget http://download.savannah.gnu.org/releases/gpsd/gpsd-3.24.tar.gz noizumi@rx7pi:~/src $ tar xvzf gpsd-3.24.tar.gz |
If ‘scons’ fails, it is possible that your target system has moved to Python 3 and removed the program ‘python’. Python.org says that if you have an installed Python, there should be a program in your path called ‘python’. This is specified in PEP 394. This rule is not always followed. You can work around this by linking python3 to python like this
python3 のシンボリックリンクを作成しろとの事だが、要はPATHが通ってる所なら良いので次のようにする。
|
1 2 3 4 5 6 7 |
noizumi@rx7pi:~/src $ echo $PATH /home/noizumi/bin:/usr/local/sbin:/usr/local/bin:/usr/sbin:/usr/bin:/sbin:/bin:/usr/local/games:/usr/games noizumi@rx7pi:~/src $ cd ~/bin noizumi@rx7pi:~/bin $ ln -s /usr/bin/python3 python noizumi@rx7pi:~/bin $ which python /home/noizumi/bin/python |
なぜか、 ln -s /usr/bin/python3 /home/noizumi/bin/python で作成できなかったので、ちょっとまだるっこしい事をやっている。
必要な開発用パッケージを入れるけど、gtk3 とか入れるとアホみたいにパッケージが入っちゃうし、gpsd と gpsmon、 cgps のテキストベースで使えれば良いので、次のものを入れた。
|
1 |
noizumi@rx7pi:~/bin $ apt-get install scons libncurses5-dev libdbus-1-dev libusb-1.0.0-dev |
|
1 2 |
noizumi@rx7pi:~/bin $ cd ../src/gpsd-3.24/ noizumi@rx7pi:~/src/gpsd-3.24 $ scons gpsd_user=gpsd gpsd_group=dialout |
|
1 2 3 4 5 6 |
WARNING: xgps and xgpsspeed are missing runtime dependencies Ensure your PYTHONPATH includes /usr/local/lib/python3/dist-packages/ WARNING: AsciiDoctor not found. WARNING: Some documentation and html will not be built. noizumi@rx7pi:~/src/gpsd-3.24 $ sudo ln -s /usr/local/lib/python3.7 /usr/local/lib/python3 |
python のライブラリのPATHは存在しないので、シンボリックリンクを張っておく。
そしてインストール
|
1 |
noizumi@rx7pi:~/src/gpsd-3.24 $ sudo scons install |
gpsd のビルドのページには、sudo scons udev-install とやれって書いてあるけど、既に gpsd-3.17のパッケージ入ってるし、そのままにしたいので、 install にしている。
一応、念の為、ちゃんと入ってるか確認。
|
1 2 |
noizumi@rx7pi:~/src/gpsd-3.24 $ which gpsd /usr/local/sbin/gpsd |
既定は prefix=/usr/local なので、全てそこにインストールされている。
|
1 |
noizumi@rx7pi:~/src/gpsd-3.24 $ sudo systemctl edit --full gpsd.service |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 |
[Unit] Description=GPS (Global Positioning System) Daemon Requires=gpsd.socket # Needed with chrony SOCK refclock After=chronyd.service [Service] Type=forking EnvironmentFile=-/etc/default/gpsd ExecStartPre=stty -F $DEVICES 115200 ExecStart=/usr/local/sbin/gpsd $GPSD_OPTIONS $DEVICES [Install] WantedBy=multi-user.target Also=gpsd.socket |
ExecStartのPATHを変更。
|
1 2 |
noizumi@rx7pi:~/src/gpsd-3.24 $ sudo systemctl daemon-reload noizumi@rx7pi:~/src/gpsd-3.24 $ sudo systemctl restart gpsd.service |
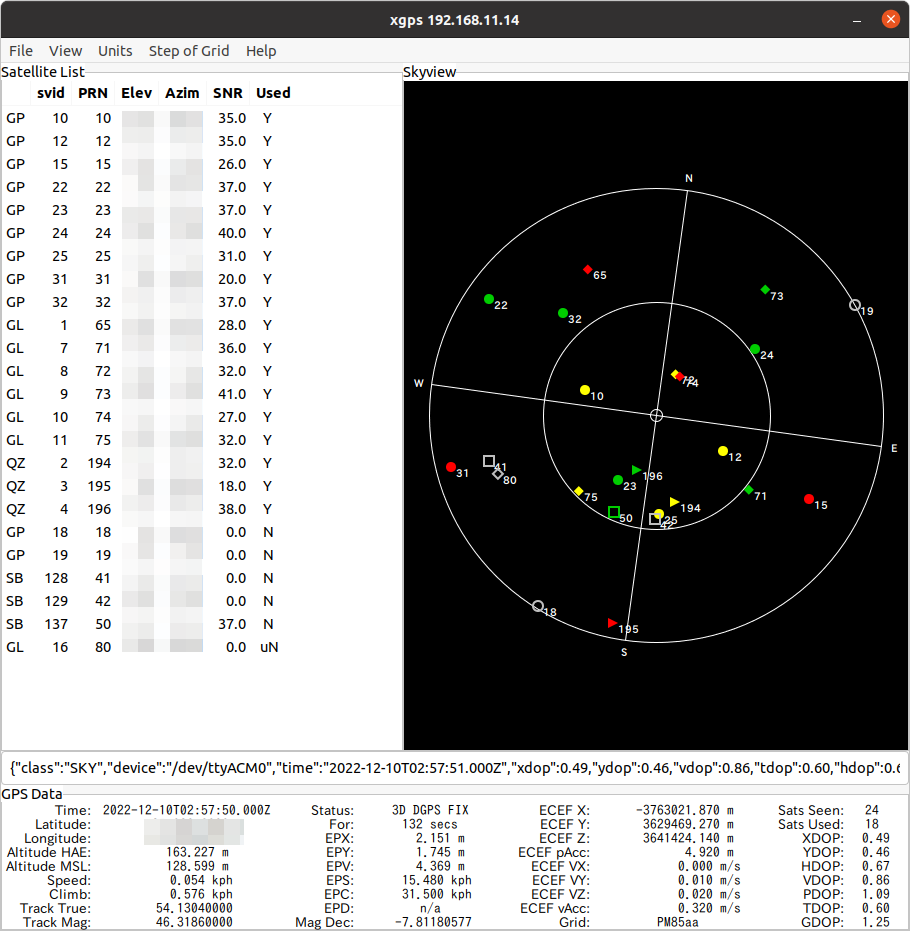
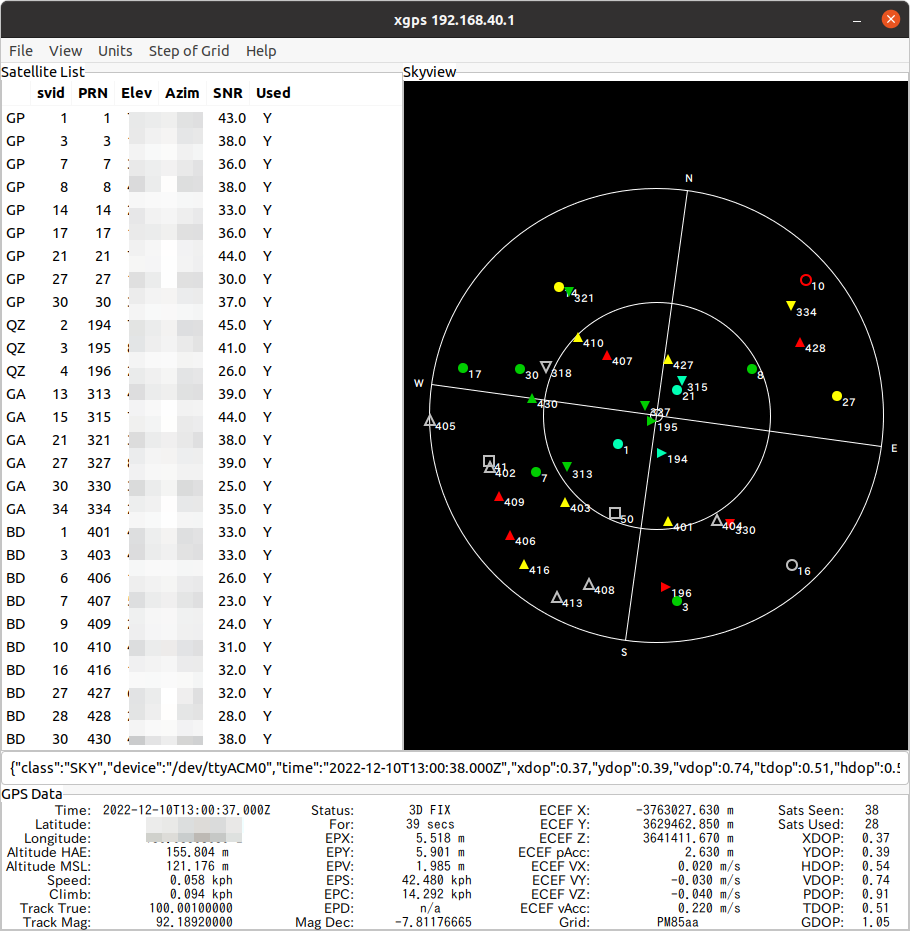
GALILEOは補足できてないけど、QZSSが補足できるようになった。
やっぱ、gpsd-3.17はQZSSに対応してなかったんだな。

これは結構いいな。
動体検知すると、こんな感じ。
車内監視用だから、外の景色は余り見えなくていい。
今、HDMIケーブルからカメラまでのケーブルが短くて、HDMIケーブルが動いたら、カメラスタンドが動いてしまう。
カメラケーブル長くして、HDMIケーブル繋いでる基盤とカメラにちょっと遊びを持たせるのと、HDMIケーブルを固定しよう。

天井しか映ってねーし(笑)
HDMIケーブルが重いから、車の振動で、カメラスタンドが動いちゃうんだな。

空模様で動体検知しまくっちゃうけど、まだ、こっちの方がマシだな。
HDMIケーブル固定するか。
これの続き。
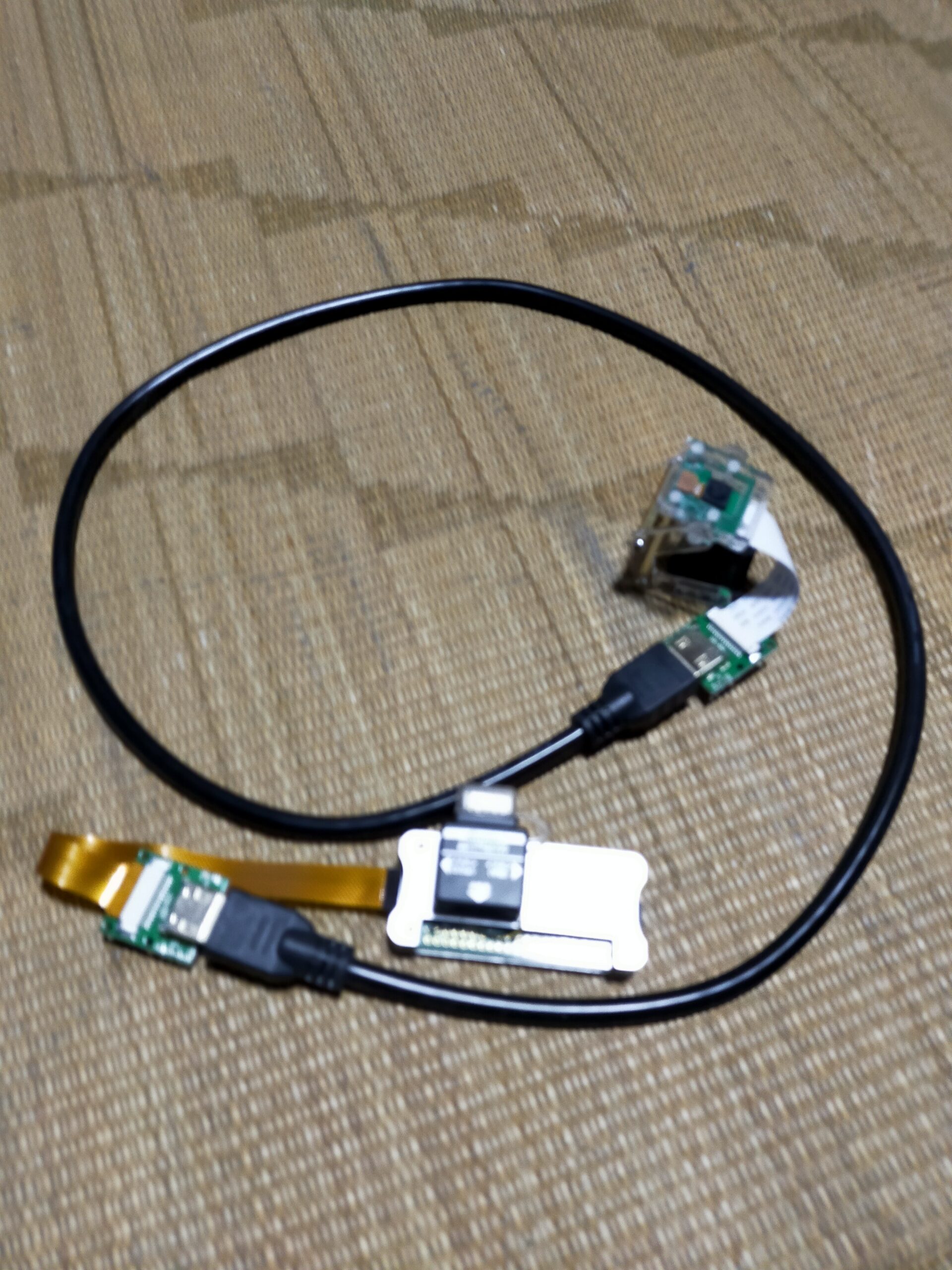
ちょいとピンぼけだが(笑)、普通にZero用カメラケーブルで接続したら、「使えますし、動作する事を確認しました」(笑)。
このHDMIケーブルは、多分、Raspberry Pi 3のセット買った時に付いてきたヤツだけど、やたら太いな(笑)
 motion の映像も全く問題無い。
motion の映像も全く問題無い。
という事で、
また接続端子のピン数が少ないRaspberry Pi Zero系統のモデルでは使えません。実際にRaspberry Pi Zero WHでは動作しないことを確認しました。
情報源: Raspberry PiのカメラモジュールをHDMIケーブルで接続する | ガジェライブ!
ここに書かれてるのは、製品付属のケーブルだと、Zero系本体のピン数が少なくて物理的に接続できないから、「使えません」だし、「動作しないことを確認しました。」なんだろうな。
しかし、Zero系用カメラケーブルを使うという、物理的接続する方法を思い付けなかったんだから、接続できない事を確認したのみで、動作しない事は確認できてないよなあ。
フラットケーブルをHDMIケーブルの電線に置き換えてるだけだから、ピン数の合う部分で物理的に接続さえできれば、Raspberry Piの本体要因で、動かないなんて事は有り得ねえだろうに。
Zero系のケーブル延長しようと思ってる奴が、これ、見て買うのやめたら、店にとって、えらい風評被害だわ。事実、わしも諦めかけたけど、書いてる事がおかしいから、実際に買って、自分の仮説を確かめようと思ったんだな。
これで、車載した時のカメラ映像を上に上げられるので、motion で監視状態の時に、空ばっかり写ってるのが、フロントガラスからの景色にできるな。 🙂