#!/bin/bash
export PATH=/home/noizumi/bin:$PATH
GPIO=26
GPIO_DIR=/sys/class/gpio
MOTION_MOVIE_DIR=/ramdisk/motion/detected
MOTION_PID=/ramdisk/motion/motion.pid
MOTION_STOP=/ramdisk/motion.stop
GPS_BASE=/ramdisk/gps_base
GPS_LATLON=/home/noizumi/bin/gpslatlon.sh
GPS_LIMIT=100
initialize(){
# GPIO26を有効化。プルアップ抵抗ON
echo $GPIO >${GPIO_DIR}/export
sleep 0.1
echo in >${GPIO_DIR}/gpio${GPIO}/direction
sleep 0.1
echo high >${GPIO_DIR}/gpio${GPIO}/direction
}
shutdown_handler(){
# GPIOクリーンアップ
echo $GPIO >$GPIO_DIR/unexport
if [ "${BT_CHECK_PID}" != "" ]; then
kill -TERM ${BT_CHECK_PID}
fi
motion_stop
exit 0
}
# 車載警報装置が発報したら、メールで通知する
mail_send(){
cat << _EOD_|/usr/sbin/sendmail -t -f yuji@noizumi.org
From: yuji@noizumi.org
To: yuji@noizumi.org
Subject: Car Security alert $1
Car Security alarm was $1 at `date +"%Y/%m/%d %H:%M:%S"`
$2
_EOD_
}
# 車載警報装置が発報したら、twilio で携帯電話にSMSを送る
sms_send(){
# 通常のSMS送信は、電話番号を購入して月額約164円払わねばならないが、
# Verify だと電話番号買わなくていいので、固定費が発生しない。
#
# 通知内容は「あなたの車載警報装置 認証コード:123456」みたいな内容だが
# 警報が発報した事が分かればよい。
curl -X POST \
https://verify.twilio.com/v2/Services/[twilio Service SID]/Verifications \
--data-urlencode "To=[わしの電話番号]" \
--data-urlencode "Channel=sms" \
-u [twilio Account SID]:[twilio Auth Token]
}
# 車載警報装置は、発報するとイヤホンマイクスイッチをONにする
# イヤホンマイク信号を GPIO 26で検知して、発報時の処理
button_pushed(){
motion_start
mail_send activated
sms_send activated
# ボタンが押されている間、ループ
while [ "`cat ${GPIO_DIR}/gpio${GPIO}/value`" = "0" ]; do
sleep 1
done
mail_send stopped
sms_send stopped
}
# 動体検知スタート
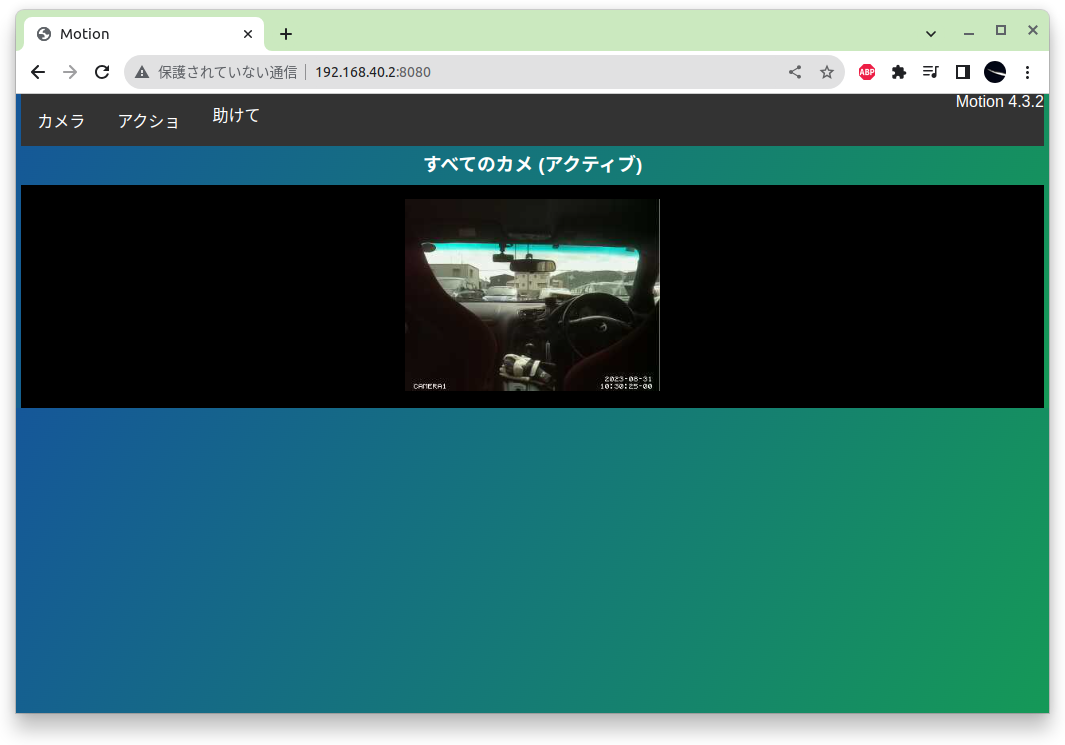
motion_start(){
MOTION_STATUS=`curl -s http://localhost:8080/0/detection/status |grep "Detection status"`
PATTERN=".*Detection status PAUSE"
if [[ $MOTION_STATUS =~ $PATTERN ]]; then
curl -s http://localhost:8080/0/detection/start >/dev/null 2>&1
fi
if [ ! -e ${GPS_BASE} ]; then
GPS_NOW=`${GPS_LATLON}`
if [ "${GPS_NOW}" != "" ]; then
echo "${GPS_NOW}" > ${GPS_BASE}
GPS_SAVE=${GPS_NOW}
fi
fi
}
# 動体検知ストップ
motion_stop(){
MOTION_STATUS=`curl -s http://localhost:8080/0/detection/status |grep "Detection status"`
PATTERN=".*Detection status ACTIVE"
if [[ $MOTION_STATUS =~ $PATTERN ]]; then
curl -s http://localhost:8080/0/detection/pause >/dev/null 2>&1
fi
if [ -e ${GPS_BASE} ]; then
rm -f ${GPS_BASE} || true
fi
}
# bluetooth チェックは別処理にし、ファイルの有無で状態を判断する
bluetooth_check(){
# bluetooth 接続状態確認
if [ -e ${MOTION_STOP} ]; then
# 接続してたら、動体検知止める
motion_stop
else
# 接続してなかったら、動体検知スタート
motion_start
fi
}
# GPSで移動距離チェック
# 警戒モードONの時、GPSの位置を gps_base ファイルに記録し、
# 以後、100m以上移動毎に現在位置をメール送信
gps_check(){
if [ "`ls /dev/gps* 2>/dev/null`" != "" ]; then
if [ -e ${GPS_BASE} ]; then
GPS_NOW=`${GPS_LATLON}`
if [ "${GPS_NOW}" != "" ] && [ "${GPS_SAVE}" != "" ]; then
DISTANCE=`distance.sh ${GPS_SAVE} ${GPS_NOW}`
if [ "`echo \"${DISTANCE}>${GPS_LIMIT}\"|bc`" = "1" ]; then
GPS_BASE_VALUE=`cat ${GPS_BASE}`
TOTAL_DISTANCE=`distance.sh ${GPS_BASE_VALUE} ${GPS_NOW}`
mail_send "GPS Warning! ${TOTAL_DISTANCE}m moved." "https://maps.google.com/maps?q=${GPS_NOW}"
fi
fi
GPS_SAVE=${GPS_NOW}
else
GPS_LIMIT=100
fi
fi
}
# メイン処理スタート
initialize
trap shutdown_handler 1 2 3 15
bt_check.sh &
BT_CHECK_PID=$!
# motion を daemon モードで起動
if [ ! -e ${MOTION_PID} ]; then
mkdir -p ${MOTION_MOVIE_DIR}
motion -b
fi
# pulseaudo 起動確認
if [ "`ps ux|grep -e \"${USER}.*pulseaudio\"|grep -v grep`" = "" ]; then
pulseaudio --start
sudo systemctl restart bluetooth.service
fi
while :; do
bluetooth_check
# 車載警報装置が発報した時
if [ "`cat ${GPIO_DIR}/gpio${GPIO}/value`" = "0" ]; then
button_pushed
fi
gps_check
sleep 1
done

![[商品価格に関しましては、リンクが作成された時点と現時点で情報が変更されている場合がございます。]](https://hbb.afl.rakuten.co.jp/hgb/3633d095.fe43814e.3633d096.face2905/?me_id=1193217&item_id=10062336&pc=https%3A%2F%2Fthumbnail.image.rakuten.co.jp%2F%400_mall%2Felecom%2Fcabinet%2Fs500_26%2Fde-c41-30000bk_03r.jpg%3F_ex%3D240x240&s=240x240&t=picttext "[商品価格に関しましては、リンクが作成された時点と現時点で情報が変更されている場合がございます。]")